Indoor Tracking is an image processing project made in C. A couple of low level algorithms are implemented relying on few external libraries. The final part of the project was the implementation of a multi-criteria tracking system.
Image processing algorithms
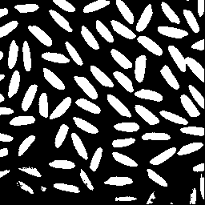
Motion detection
Two techniques implements the detection of motion. One based on the temporal difference of images and the second on a difference with a reference. More concretely, the first method is an absolute difference of images at the time t and t-1 (of the sequence of image), then threshold is applied to detect the presence of motion. The latter method is doing the same absolute-threshold difference, but between the image of time t and a reference image. This reference image needs to be as close as possible to the fixed background, therefore, the temporal mean or temporal median image of the full sequence is used as the reference.


Mathematical morphology operators
Erosion, dilation, opening and closing, they are techniques for the analysis and processing of geometrical structures (read: discrete-binary images) based on the theory of ensemble. Those techniques allow to denoise (salt noise for example) binary images.
Image segmentation and region characterization
Image segmentation algorithms in conjunction with region characterization are implemented. Image segmentation is a range of techniques that assign labels to particular region of an image. Then, it is possible to extract characteristics from each region (read: pixels with the same label). Therefore, for each region is computed its : pixel size, barycentre, covariance matrix, main direction, mean gray level, means for each RGB component and gray histogram.


Interest point detection
A number of techniques are possible to the detection of interest points (used for subsequent processing). In this project, the Harris method a corner detection operator is implemented. A corner can be interpreted as the junction of two edges, where an edge is a sudden change in image brightness. Corners are the important features in the image, and they are generally termed as interest points which are invariant to translation, rotation and illumination.
Multi-criteria tracking system
The final goal of this project was the implementation of a multi-criteria tracking system.
What this fancy name even mean you may ask ? This is an end to end method, that is where the system is coming from. The user of the method can choose which object to follow during the complete sequence of images, that is for the tracking. And the computation that tracks this object is based on not one but an ensemble of image processing techniques, there you go with your multi-criteria !
Ok, and what your tracking stuff is doing ?
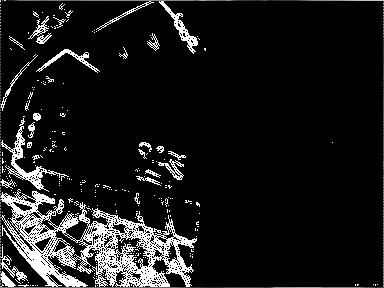
One can take a full sequence of images (based on a video), the system is first going to compute the detection of motion on each frame (using our second technique, with the median as reference).

A noisy binary image is obtained (the camera may be imperfect), thus we use a combination of opening and closing to denoisify the motion images’ sequence.
The system use our segmentation algorithm and characterized each labeled region. Then, for each image and each moving region, the characteristics are saved in a .json file to abstract some constraints of computation time. Once those pre-processing steps are made, the user can choose on the first frame the region (e.g.: a person) to be tracked during the full sequence. The algorithm now, need to choose the most likelihood regions in the subsequent frames. This is not trivial, since image data are noisy even after some pre-processing.
All the characteristics of the initial region are loaded. For every other frames, an innovative algorithm (note: glorifying my home-made algorithm) decided what the most likelihood region is, based on past information. In short the algorithm look at the proximity of the chose region on the last frame :
- If there is only one region, this is the chosen one.
- If there is no region, then we keep the focus on the last region, but warn the user of the momentary loss of tracking.
- If there are multiple regions, then we need to solve conflicts. The region that has to the previous tracked regions the most similar statistics (L1 distance) based on features such as the histogram and color average, is selected.